/home/docs/checkouts/readthedocs.org/user_builds/wradlib/conda/latest/lib/python3.13/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
PROJCRS["AEQD centered at 50.73052N 7.071663E",BASEGEOGCRS["unknown",DATUM["World Geodetic System 1984",ELLIPSOID["WGS 84",6378137,298.257223563,LENGTHUNIT["metre",1]],ID["EPSG",6326]],PRIMEM["Greenwich",0,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8901]]],CONVERSION["unknown",METHOD["Azimuthal Equidistant",ID["EPSG",1125]],PARAMETER["Latitude of natural origin",50.73052,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8801]],PARAMETER["Longitude of natural origin",7.071663,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8802]],PARAMETER["False easting",0,LENGTHUNIT["metre",1],ID["EPSG",8806]],PARAMETER["False northing",0,LENGTHUNIT["metre",1],ID["EPSG",8807]]],CS[Cartesian,2],AXIS["(E)",east,ORDER[1],LENGTHUNIT["metre",1,ID["EPSG",9001]]],AXIS["(N)",north,ORDER[2],LENGTHUNIT["metre",1,ID["EPSG",9001]]]]
semi_major_axis :
6378137.0
semi_minor_axis :
6356752.314245179
inverse_flattening :
298.257223563
reference_ellipsoid_name :
WGS 84
longitude_of_prime_meridian :
0.0
prime_meridian_name :
Greenwich
geographic_crs_name :
unknown
horizontal_datum_name :
World Geodetic System 1984
projected_crs_name :
AEQD centered at 50.73052N 7.071663E
grid_mapping_name :
azimuthal_equidistant
latitude_of_projection_origin :
50.73052
longitude_of_projection_origin :
7.071663
false_easting :
0.0
false_northing :
0.0
array(0)
KDP
(azimuth, range)
float32
...
format :
UV8
long_name :
Specific differential phase HV
standard_name :
radar_specific_differential_phase_hv
units :
degrees per kilometer
_Undetect :
0.0
[360000 values with dtype=float32]
PHIDP
(azimuth, range)
float32
...
format :
UV16
long_name :
Differential phase HV
standard_name :
radar_differential_phase_hv
units :
degrees
_Undetect :
0.0
[360000 values with dtype=float32]
DBZH
(azimuth, range)
float32
...
format :
UV8
long_name :
Equivalent reflectivity factor H
standard_name :
radar_equivalent_reflectivity_factor_h
units :
dBZ
_Undetect :
0.0
[360000 values with dtype=float32]
DBZV
(azimuth, range)
float32
...
format :
UV8
long_name :
Equivalent reflectivity factor V
standard_name :
radar_equivalent_reflectivity_factor_v
units :
dBZ
_Undetect :
0.0
[360000 values with dtype=float32]
RHOHV
(azimuth, range)
float32
...
format :
UV8
long_name :
Correlation coefficient HV
standard_name :
radar_correlation_coefficient_hv
units :
unitless
_Undetect :
0.0
[360000 values with dtype=float32]
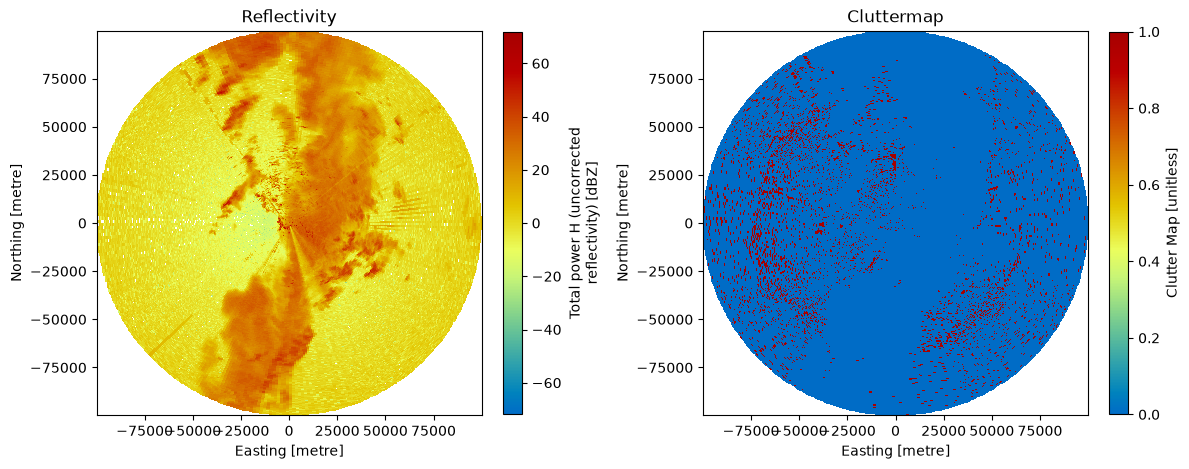
DBTH
(azimuth, range)
float32
...
format :
UV8
long_name :
Total power H (uncorrected reflectivity)
standard_name :
radar_equivalent_reflectivity_factor_h
units :
dBZ
_Undetect :
0.0
[360000 values with dtype=float32]
DBTV
(azimuth, range)
float32
...
format :
UV8
long_name :
Total power V (uncorrected reflectivity)
standard_name :
radar_equivalent_reflectivity_factor_v
units :
dBZ
_Undetect :
0.0
[360000 values with dtype=float32]
VRADH
(azimuth, range)
float32
...
format :
UV8
long_name :
Radial velocity of scatterers away from instrument H
PROJCRS["AEQD centered at 50.73052N 7.071663E",BASEGEOGCRS["unknown",DATUM["World Geodetic System 1984",ELLIPSOID["WGS 84",6378137,298.257223563,LENGTHUNIT["metre",1]],ID["EPSG",6326]],PRIMEM["Greenwich",0,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8901]]],CONVERSION["unknown",METHOD["Azimuthal Equidistant",ID["EPSG",1125]],PARAMETER["Latitude of natural origin",50.73052,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8801]],PARAMETER["Longitude of natural origin",7.071663,ANGLEUNIT["degree",0.0174532925199433],ID["EPSG",8802]],PARAMETER["False easting",0,LENGTHUNIT["metre",1],ID["EPSG",8806]],PARAMETER["False northing",0,LENGTHUNIT["metre",1],ID["EPSG",8807]]],CS[Cartesian,2],AXIS["(E)",east,ORDER[1],LENGTHUNIT["metre",1,ID["EPSG",9001]]],AXIS["(N)",north,ORDER[2],LENGTHUNIT["metre",1,ID["EPSG",9001]]]]